Saldatura 6 assi la tecnologia dei robot Etneo
Le soluzioni 6 assi nascono dalla partnership con l’italiana costruttrice di robot Comau. Sono disponibili vari modelli con differenti aree di lavoro utile e differenti configurazioni.
Un esempio è il Robot Racer di cui esistono 3 diverse tipologie: Racer3, Racer5-0,63 e Racer5-0.80. Velocità e precisione abbinate a stile e bellezza rendono questo sistema a 6 assi il prodotto perfetto per le applicazioni di saldatura che Etneo propone a tutti i clienti del settore automotive ed elettronica.
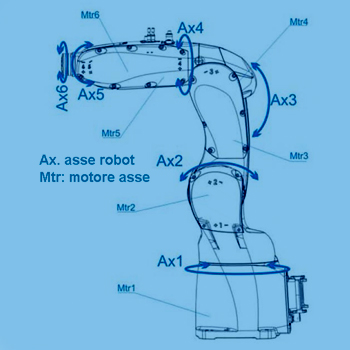
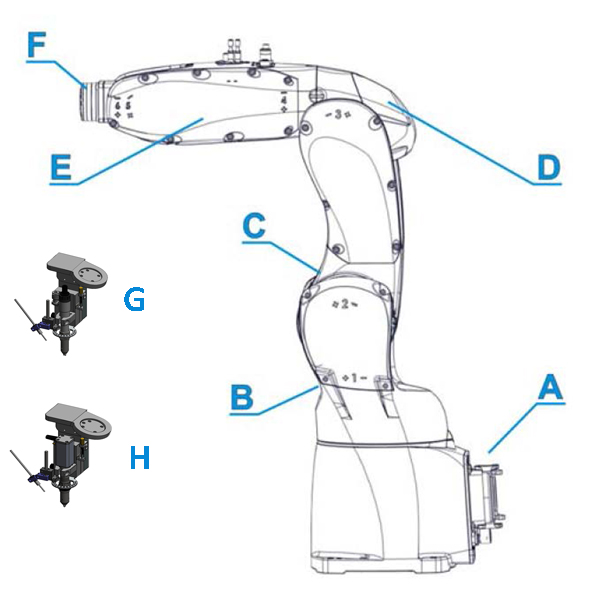
ASSI E MOTORI

RACER SALDANTE
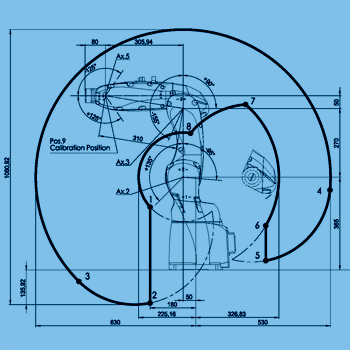
MISURE e DIMENSIONI
DATI TECNICI
Specifiche tecniche dettagliate Robot di saldatura 6 assi
Numero di assi
Payload
Reach massimo orizzontale
Coppia assi 4
Coppia assi 5
Coppia assi 6
Velocità Asse 1
Velocità Asse 2
Velocità Asse 3
Velocità Asse 4
Velocità Asse 5
Velocità Asse 6
Ripetibilità
Flangia porta attrezzi
Peso Robot
Grado di protezione
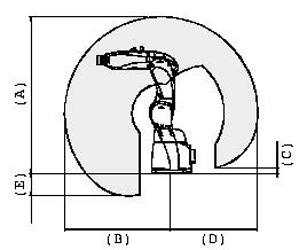
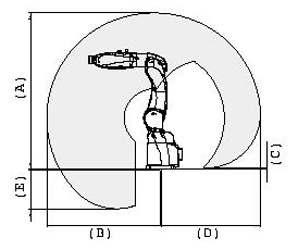
Area di lavoro A
Area di lavoro B
Area di lavoro C
Area di lavoro D
Area di lavoro E
6
da 3 a 5kg
da 630mm a 809mm
da 7,36Nm a 8,83Nm
da 7,36Nm a 8,83Nm
da 4,41Nm a 4,91Nm
±170° (430-400-360°/s)
-95°/+135° (450-360-300°/s)
-155°/+90° (500-400-330°/s)
±200° (600-500-500°/s)
±125° (600-500-500°/s)
±2700° (900-800-800°/s)
da 0,02mm a 0,03mm
ISO 9409 – 1- A25
da 30kg a 32kg
IP54, opzionale IP65
da 1081 a 1124mm
da 630 a 809mm
da 37 a 8mm
da 530 a 708mm
da 136 a 286mm
Tutti i file tecnici disponibili per il download

Robustezza, manutenzione minima, elevata potenza
Le soluzioni 6 assi necessitano sono tecnologicaente avanzate, affidabili e flessibili, appositamente progettate per le esigenze dei clienti. I motori degli assi sono di tipo Ac brushless ed integrano al loro interno il freno e l’encoder. I riduttori sono del tipo a gioco ridotto. Gli assi sono dotati di fine corsa software programmabili. I robot possono anche essere forniti con un finecorsa meccanico. Il robot è gestito e controllato dall’unità di controllo proprietaria Comau.
L’elevata potenza della testa saldante permette di poter operare in molteplici ambiti senza dover esasperare la temperatura della punta di saldatura. Ogni applicazione richiede la corretta testa di saldatura, il punto in comune tra i vari modelli disponibili è la capacità di adattamento grazie alla geometria e configurazione meccanica settabile e variabile.
CARATTERISTICHE MECCANICHE
Tecnologia di saldatura applicata alla robotica
La combinazione perfetta tra movimentazione e saldature di precisione. La possibilità di interconnessione con altri robot, la gestione della manutenzione da remoto, tutto questo customizzabile per ogni applicazione.
POSSIBILI APPLICAZIONI




ESEMPI DI INSTALLAZIONI

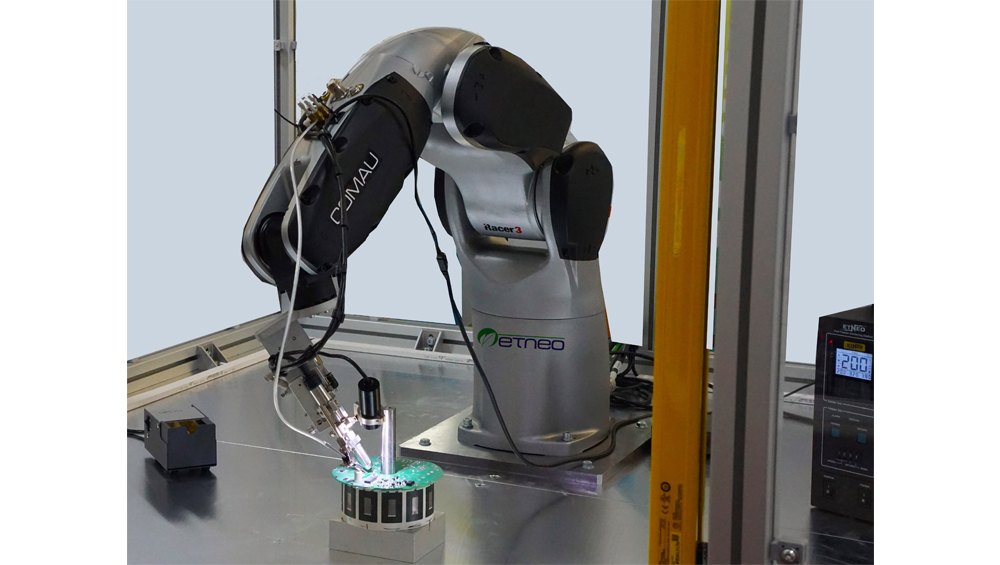
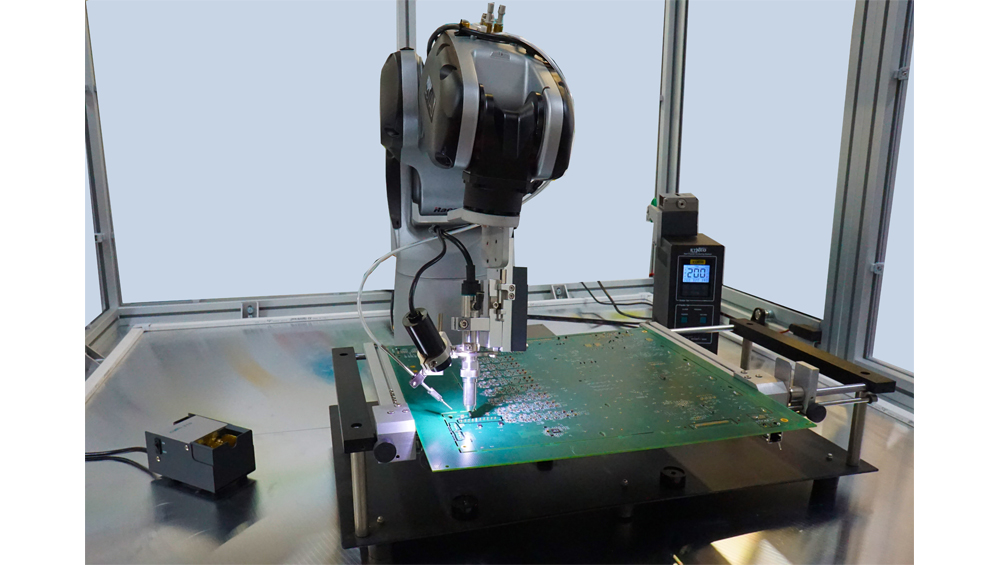
Cella Racer 3
Italia. Installazione di robot Racer3 a 6 assi all’interno di box protettivo, completo di sistema di visione tramite micro camera per visualizzare in tempo reale le operazioni di saldatura.